Micro:bit on otto
Hello, otto
otto 是个可爱的 Arduino 开源双足教育机器人项目。寒假前,福州哈雷创客空间的朋友找到我说希望整个 micro:bit(mbt) 的冬令营,本来想说之前做的RC车换个玩具车的底盘就能上了,结果被嫌弃说车子满大街,而且希望小朋友们能多学点东西,体现一点逼格。后来找来找去,发现 otto 还是比较合适。因为扯到动作的话,可以说是无底洞,够玩很久的。好吧,那就 otto 吧。
框架设计
接下活儿,就发现原来还是个不小的坑。因为主控还是 micro:bit,金手指部分的 IO 口其实少得可怜,除去鳄鱼夹口、按键、LED、i2c、SPI以后,只有 P8、P16 可用。还有 IDE 部分,makecode 在浏览器里拖来拖去感觉是很方便,但是也确实太占地方了……超过三层的嵌套看过去就是很大一坨了,而且传参数部分还有分行处理,平常一行的代码也会变得一大坨。写库的话,如果是这样,大家平时看不到,还是可以忍受,但是来小朋友来玩就不太合适了。
库的部分,也是不看不知道,一看吓一跳。内容其实也是很多,那最简单的舵机转至特定角度来说,本质是保持一个特定占空比的脉冲输出。在火车扳道这类的动作中,比较直接,只要一条指令就可以了,然后 PWM 保持住就可以了。而在机器人则全然不是这么一回事。这里有了速度的概念,在 5 秒和在 0.5 秒内从 0 度到 90 度,对于机器人来说,是完全不同的两个概念,前者可以实现一个金鸡独立的动作,而后者则会因为动作太快直接倒地。这里就出现了动作帧的概念。毕竟模拟舵机的命令周期是 25ms。那么基本就是每 25ms 有一个动作帧。一个 5 秒的连续动作,拆分成 5000 / 25 = 200 帧。
于是代码分为三层:1)最底层:保持 PWM 信号;2)中间层:拆分动作帧并发送至最底层;3)业务层:动作业务逻辑,发送到中间层。这里对于 mbt 以及 mbed 就有很多问题:
- PWM 口不足,其实也有看到实现了三只舵机驱动的版本。
- 哪怕通过 PCA9685 扩展 PWM 口,中间层感觉在 mbt 上感觉也不太容易实现,一方面:这部分有实时性很高,而 mbt 在接口部分已经经过了层层封装,而且看起来用的还是“高级语言”。
- 如果 microbit 这么忙的话,对于蓝牙连接等会不会有比较大的影响?
想来想去,还是觉得把底下两层外移,引入一块舵机板来解决问题。好在 mbt 的串口能转发到金手指上。至于舵机板呢?那就自己开发好了,反正手也痒了很久了。
micro:bit –串口–> 舵机板(STM32) –i2c–> PCA9685 –> 舵机
数据流向大概就是这样,在 mbt 上只要实现动作的业务指令,剩下的事情都交给底层去作好了。舵机驱动这一层,暂时是用到了 PCA9685 作为 PWM 芯片,好处是支持多路扩展,一片就能支持16路PWM,能支持62片,而且配置简单;缺点是“理论精度”不够。相信在下一个版本中,就会取消 PCA9685,改由 STM32 的 PWM 直接驱动,毕竟作为 otto 来说,基本款只需要4只舵机,哪怕再加2只胳膊,也不过是6只舵机而已,48脚的 STM32 就能胜任了。
使用串口作为舵机板的接口,是有很多好处的,和很久以前作的 3D8 光立方一样,最主要的作用就是支持各种控制平台,串口不处不在,各种单片机、PC都能有串口数据,而PC上各种语言,基本也都有串口的库方便调用。在机器人,尤其是偏“舞蹈”方向的机器人,会让调试变得很容易,如果编辑好动作,主要将同样的逻辑在“生产环境”上移植就好。毕竟各个舵机如何配合、转多少度、快慢、怎么转,在PC上调试都容易很多,避免了单片机重复烧写的麻烦。
舵机板设计
舵机板主控芯片采用最平民的STM32F103C8T6。包含以下几个功能:
- 舵机驱动:PCA9685 (以后会改为 PWM 直驱),PCB上预留8路,实际使用4路;
- EEPROM:用于存储舵机校准数据;
- 异步串口指令接口;
为什么要异步呢?首先,现在大部分新一点单片机的串口硬件层面都支持全双工通讯,也就是发送和接收可以同时进行。上游发来的指令,其实不用等下游响应,可以一口气一直发,提高命令发送频率;而作为响应,因为响应的通道是独立的,只要指令执行完了,就可以把响应报文放入响应队列(接收的数据也是往队列里塞)。发送报文和接收报文之间的对应关系,通过某个自增的id进行对应就可以了。这样的方式,其实也是向下兼容半双工/单工的方式的。上位机在发送报文之前,清空接收的缓存。在发送报文之后,等待同样id的响应报文出现就可以了。
- 标准 USART 和 USB-CDC 双串口设计;
标准 USART 作为与 mbt 的连接,自然必不可少。有了它,就能通过 USB 转串口FTDI设备(FT232, CP210X, PL2303, CH340)等也能实现 USB 接口与 PC 连接。但是,既然 STM32F103 上提供了 USB2.0 接口,又何必闲着呢,CDC 驱动基本就是将设备模拟成串口设备了,是 USB 接口最基本的应用之一。软件部分还是当串口设备来连,也不需要引入特别的驱动程序(其实主要是因为还不会……),各个操作系统都能直接用,还是很不错哒。
- 动作帧自动生成;
把这部分功能接到舵机板这边实现,上位机的指令在驱动板上得到分解。这样,上位机只需要在下一个动作需要执行的时候,再发送下一个动作的指令即可。这样上位机的运算负担能减轻很多。动作的流程变为:“用1秒时间来匀速抬腿”->“延时1秒,用以等待动作完成”->“再用1秒时间来匀速收腿”->“再延时1秒,用以等待动作完成”。从命令角度来说,就成为“发送串口指令-延时等待”、“再发送串口指令-再延时等待”这样的模式。在 mbt 这样的开发环境下,由于有 MBed 这样实时操作系统的加持,所谓的延时,也会用去跑别的任务(线程),反而是释放系统资源的好事。
- 独立的舵机控制通道;
在讲解异步的部分已经提到,上位机发送指令不需要等待,而可以连续发送,如果上位机发送了一条“10秒内,将0号舵机匀速移动至180度”的指令,那么在未来的10秒中,如果没有其它针对0号舵机的指令出现,那么它就一直按计划进行动作,因为这条命令已经发送完了,那么上位机可以继续发送1号、2号、3号舵机的指令,有的在0.5秒内完成,有的3秒完成。指令应该互不干扰,只有面向同样目标的指令才会
otto 底层驱动分析
otto 那么多的代码,其实在这次设计中最关注的舵机控制的部分,是玩舵机类制作难得的学习资料。
其实各种动作,无非是4路舵机驱动指令的组合。而对于单路舵机的控制命令,只有2种:平动(moveTo)和摆动(oscillate)。同时执行的多路指令,无非是将单路指令进行组合就是。但是,由于它们占用同样的时间长度。所以,otto原生驱动目前只能做到4路舵机同时平动或同时摆动。这就让有些动作变得比较奇怪了,比如迈步走。而由于我的舵机板实现了独立舵机通道和动作帧自动生成,所以就能实现在同一时间内,某些舵机是在作平动,有些是在摆动,动作会更规范一些。
平动 moveTo
这是最基础的控制指令,参数有3个:舵机号、目标角度和时间(ms)。可以读成:将多少毫秒内将某号舵机移动至某角度。
这个指令,其实并不关心当前舵机的角度,也就是说它只关注终点而不关心起点,起点是由上一条指令决定的。这是原生驱动的做法。
在我的舵机板内,由于使用“命令-延时”的模式,既然命令中已经包含了时间参数,那么“理论上”,上位机应该遵守这个约定,给舵机板以足够的时间来执行动作,时间只多不少,再执行下一步指令。但舵机板其实不纠结的,如果延时没有给够,新的指令就来了,那么,舵机板就会以收到命令时刻的舵机角度作为起点,使用新的时间参数和目标角度,重新计算动作帧,旧指令自动作废。比方说,舵机当前在90度,然后执行平动命令“2000ms内到达0度”,舵机开始往0度位置开始移动,在1000ms以后,舵机还未到达90度,只是在45度的位置,此时突然接到新的命令“在1000ms内到达180度”,那么此时舵机就会将0度的老目标抛在脑后,开始执行到180度的指令,关注终点,而不关注起点。
- Easing 支持
不会 CSS 的 Python 工程师,不是好的嵌入式开发工程师。
Easing是CSS的一个函数子集。主要用于微调 CSS 动画的变化方式(轨迹)。除了默认标准的匀速运动(Linear),还有很多诸如“快入慢出”、“慢入快出”、“慢入慢出”、“快入快出”等操作。至于快慢怎么定义,其实还是有很多标准的曲线作为参考,如正弦,平方、指数等等。
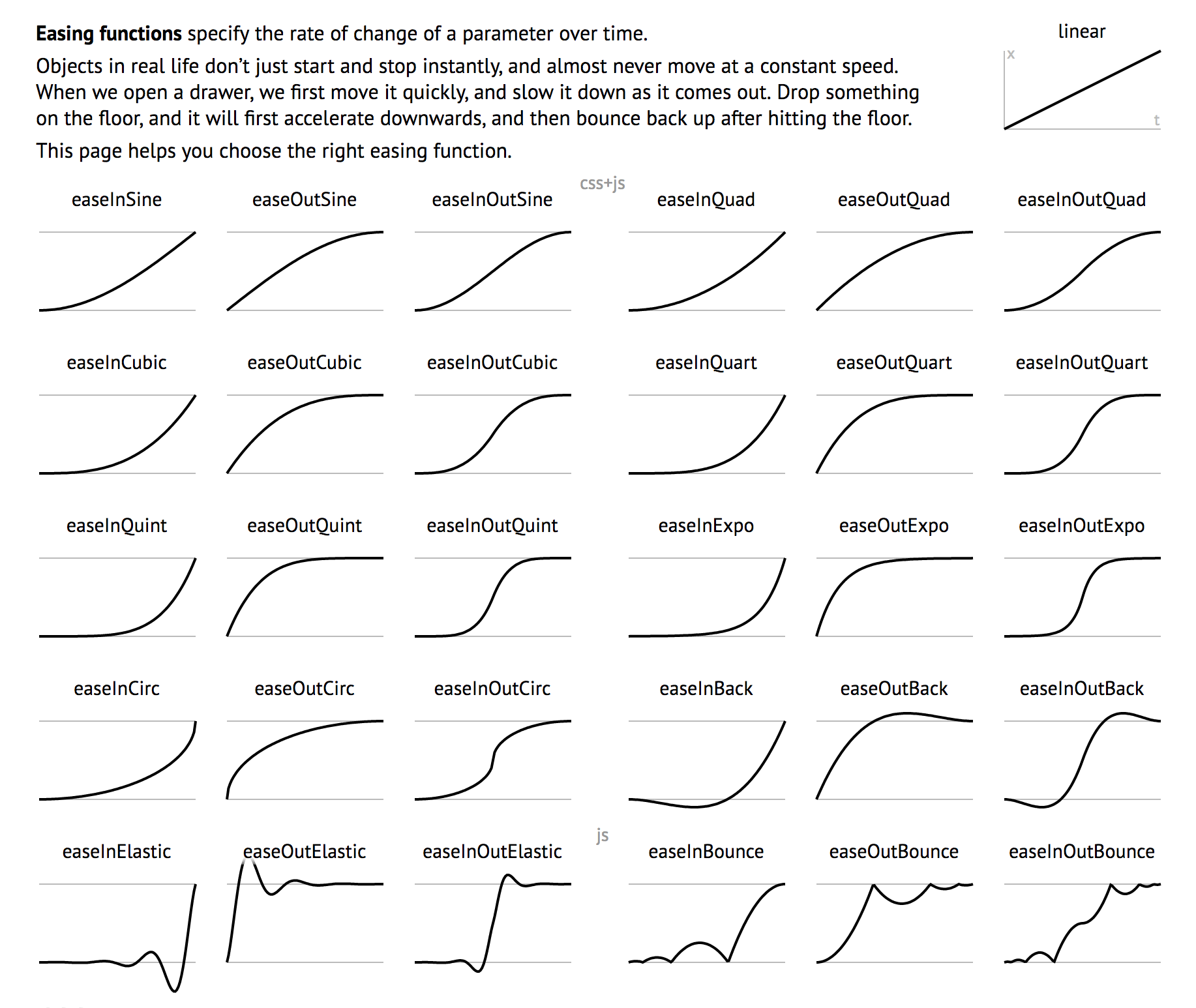
所以舵机板支持的移动曲线,除了标准的匀速运动(Linear),还支持多种设置。以 BounceOut 为例,其意义为以“弹跳”的方式“出”,在下图的视频中,舵机臂从 20 度至 160 度的时候,采用 BounceOut 方式,再以同样的方式,从 160 度回到 20 度。
能够这样配置,可以让既定的动作增加很多细节,用的还是原来的目标角度和时间。帅气~
摆动 oscillate
otto 的驱动部分最让我惊艳到的就是摆动函数。以正弦函数为基础,摆动函数实现的是舵机的周期性摆动。原生驱动中包含:A(Amplitude 幅度), O(Offset 起始偏移), T(Time 周期), phase_diff(相位角偏移)四个参数。

T (Time 周期),定义和平动参数中的时间一样,都是给完成动作设定时间。不同的是,当动作完成时,平动到达目标角度,而摆动是回到起始角度(摆过去后,又摆回来),相当于 x 轴上 2 * pi 的长度。
A(Amplitude 幅度),正弦曲线所在圆的半径,因此最大值与最小值之间的差值是A的2倍。不过由于我们的配置目标也是舵机臂的角度,所以这个参数的单位也是
度。O (Offset 起始偏移),默认是0,也就是舵机臂90度的位置。假设 phase_diff 也是默认值0,而A幅度值为20°。那么在一个周期内,舵机的摆动轨迹是:90° - 110° - 90° - 70° - 90°。如果起始偏移 Offset 设为 -30°,那么舵机的摆动轨迹是:60° - 80° - 60° - 40° - 60°。有个整体的偏移。
phase_diff(相位角偏移),是最难理解的部分。在默认值0的情况下,是从sin曲线的 0° 作为起点,那么摆动轨迹(A=20°)为 90° - 110° - 90° - 70° - 90°,是一个先升后降再升的规律。而如果相位角偏移为 90,那么sin曲线周期是从 90° 位置开始计算来完成这样一个周期,这样舵机运动对轨迹就变成了:90° - 70° - 50° - 70° - 90°,是一个先降后升的规律。这样就能实现单向的摆动。
(未完待续)